Characterizing Visual Localization and Mapping Datasets
Stefan Leutenegger Paul H. J. Kelly Andrew J. Davison
![]()
Overview
Benchmarking mapping and motion estimation algorithms is established practice in robotics and computer vision. As the diversity of datasets increases, in terms of the trajectories, models and scenes, it becomes a challenge to select datasets for a given benchmarking purpose. This paper addresses this concern by developing novel metrics to evaluate trajectories and the environments without relying on any SLAM or motion estimation algorithm. The metrics, which so far have been missing in the research community, can be applied to the plethora of datasets that exist. The proposed metric is a general metric and can be used for other purposes. To demonstrate the effectiveness of the metric in robotic applications, the metric has also been applied to run-time SLAM adaptation. Additionally, to improve the robotics SLAM benchmarking, the paper presents a new dataset for visual localization and mapping algorithms. A broad range of real-world trajectories is used in very high-quality scenes and a rendering framework to create a set of synthetic datasets with ground-truth trajectory and dense map which are representative of key SLAM applications such as virtual reality (VR), micro aerial vehicle (MAV) flight, and ground robotics.
Interior Scenes

|
|
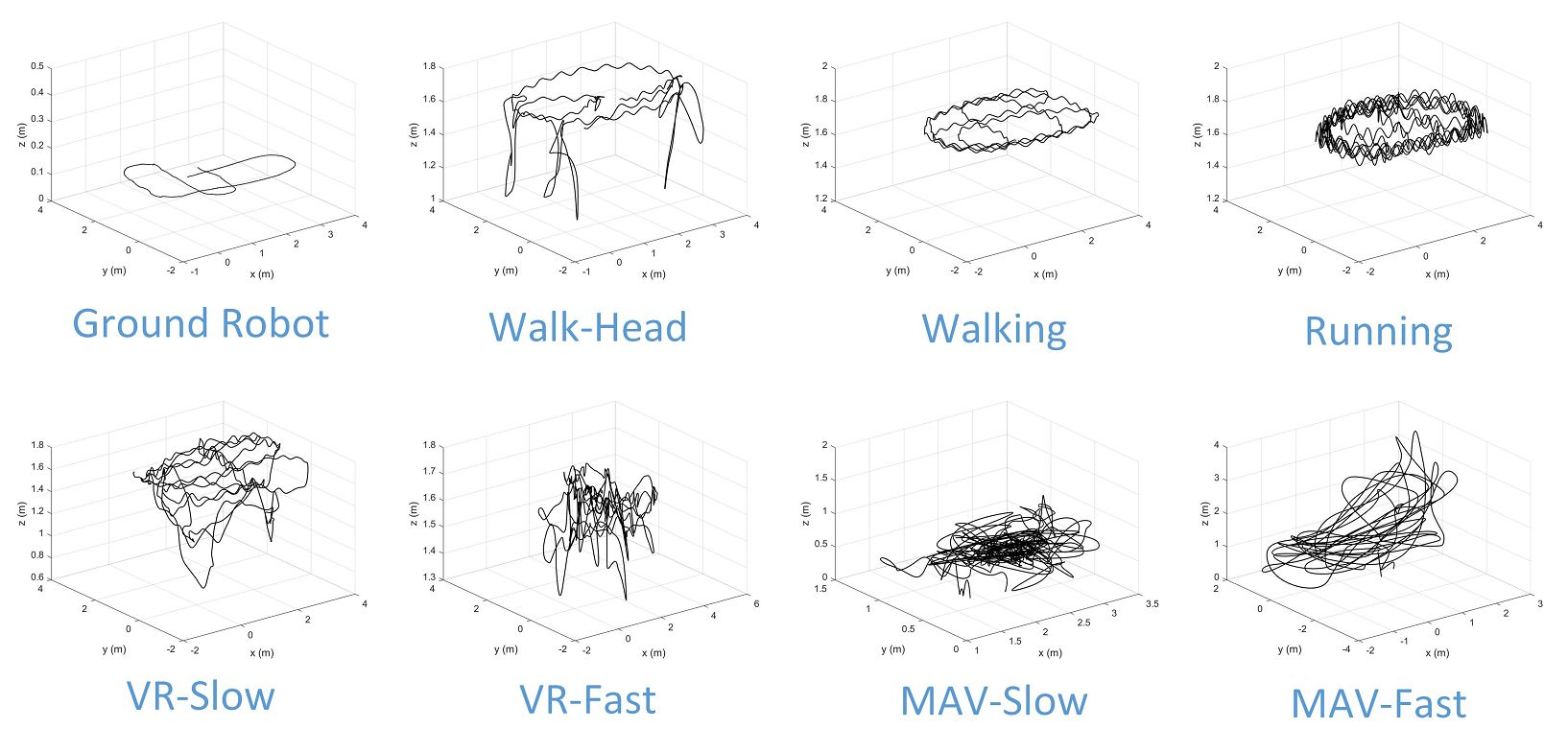
Real-world Trajectories
Here we demonstrate several ground truth camera trajectories used in our work:
|
Rendered RGB-D GT: Deer Scene
|
Ground Robot Number of Images: 1600. Size: 587M/1.4G Frame Rate: 20Hz Total Time: 80 secs RGB-D PNGs RGB-D PNGs with noise GT Poses ViSim format: TrajectoryGT |
Walk Head Number of Images: 1308. Size: 603M/1.3G Frame Rate: 20Hz Total Time: 65 secs RGB-D PNGs RGB-D PNGs with noise GT Poses ViSim format: TrajectoryGT |
Walk Number of Images: 1281. Size: 586M/1.3G Frame Rate: 20Hz Total Time: 60 secs RGB-D PNGs RGB-D PNGs with noise GT Poses ViSim format: TrajectoryGT |
Running Number of Images: 569. Size: 259M/582M Frame Rate: 30Hz Total Time: 17 secs RGB-D PNGs RGB-D PNGs with noise GT Poses ViSim format: TrajectoryGT |
|---|---|---|---|
|
VR Slow Number of Images: 2083. Size: 1.0G/2.1G Frame Rate: 30Hz Total Time: 62.5 secs RGB-D PNGs RGB-D PNGs with noise GT Poses ViSim format: TrajectoryGT |
VR Fast Number of Images: 1228. Size: 581M/1.2G Frame Rate: 20Hz Total Time: 60 secs RGB-D PNGs RGB-D PNGs with noise GT Poses ViSim format: TrajectoryGT |
MAV Slow Number of Images: 2001. Size: 1.2G/2.0G Frame Rate: 20Hz Total Time: 100 secs RGB-D PNGs RGB-D PNGs with noise GT Poses ViSim format: TrajectoryGT |
MAV Fast Number of Images: 2050. Size: 1.0G/2.0G Frame Rate: 20Hz Total Time: 100 secs RGB-D PNGs RGB-D PNGs with noise GT Poses ViSim format: TrajectoryGT |
Rendered RGB-D GT: Diamond Scene
|
Ground Robot Number of Images: 1600. Size: 673M/1.4G Frame Rate: 20Hz Total Time: 80 secs RGB-D PNGs RGB-D PNGs with noise GT Poses ViSim format: TrajectoryGT |
Walk Head Number of Images: 1308. Size: 722M/1.2G Frame Rate: 20Hz Total Time: 65 secs RGB-D PNGs RGB-D PNGs with noise GT Poses ViSim format: TrajectoryGT |
Walk Number of Images: 1281. Size: 664M/1.2G Frame Rate: 20Hz Total Time: 60 secs RGB-D PNGs RGB-D PNGs with noise GT Poses ViSim format: TrajectoryGT |
Running Number of Images: 569. Size: 309M/548M Frame Rate: 30Hz Total Time: 17 secs RGB-D PNGs RGB-D PNGs with noise GT Poses ViSim format: TrajectoryGT |
|---|---|---|---|
|
VR Slow Number of Images: 2083. Size: 1.0G/2.0G Frame Rate: 30Hz Total Time: 62.5 secs RGB-D PNGs RGB-D PNGs with noise GT Poses ViSim format: TrajectoryGT |
VR Fast Number of Images: 1228. Size: 718M/1.2G Frame Rate: 20Hz Total Time: 60 secs RGB-D PNGs RGB-D PNGs with noise GT Poses ViSim format: TrajectoryGT |
MAV Slow Number of Images: 2001. Size: 1.1G/1.9G Frame Rate: 20Hz Total Time: 100 secs RGB-D PNGs RGB-D PNGs with noise GT Poses ViSim format: TrajectoryGT |
MAV Fast Number of Images: 2050. Size: 1.0G/2.0G Frame Rate: 20Hz Total Time: 100 secs RGB-D PNGs RGB-D PNGs with noise GT Poses ViSim format: TrajectoryGT |
Evaluation
| No. | Model | Trajectory | ATE [m] | RPE [m] | Tracked [%] |
|---|---|---|---|---|---|
| 1 | Deer | Ground Robot | 0.01452 | 0.01104 | 59 |
| 2 | Deer | Walk-Head | 0.2074 | 0.05496 | 99 |
| 3 | Deer | Walk | 0.08640 | 0.1454 | 100 |
| 4 | Deer | Run | 0.04650 | 0.0672 | 64 |
| 5 | Deer | VR slow | 0.6152 | 0.06583 | 98 |
| 6 | Deer | VR fast | 0.9051 | 0.3117 | 40 |
| 7 | Deer | MAV slow | 0.0102 | 0.0929 | 100 |
| 8 | Deer | MAV fast | 0.9525 | 0.0681 | 96 |
| 9 | Diamond | Ground Robot | 0.2112 | 0.0181 | 100 |
| 10 | Diamond | Walk-Head | 0.0187 | 0.0482 | 100 |
| 11 | Diamond | Walk | 0.0479 | 0.0530 | 100 |
| 12 | Diamond | Run | 0.1408 | 0.0750 | 100 |
| 13 | Diamond | VR slow | 0.0192 | 0.0667 | 100 |
| 14 | Diamond | VR fast | 1.354 | 0.3113 | 57 |
| 15 | Diamond | MAV slow | 0.0086 | 0.0758 | 100 |
| 16 | Diamond | MAV fast | 0.0090 | 0.1162 | 100 |
Table 1. Absolute trajectory error (ATE), relative pose error (RPE), and the percentage of the frames being tracked by ORBSLAM2.0 in the RGB-D mode, for all trajectories in the two models, deer and diamond.

Here we show two sample trajectories above for MAV-Slow and MAV-Fast from two different scenes.
License
The scenes, images, video and related ground truth data presented within this page is intended for research use ONLY.
Acknowledgements
This research is supported by Engineering and Physical Sciences Research Council (EPSRC), grant references EP/K008730/1 and EP/N018494/1. We also thank Dr. Rui Tang from kujiale.com for providing us the scenes Diamond and Deer.
Citation
 |
Sajad Saeedi, Eduardo D C Carvalho, Wenbin Li, Dimos Tzoumanikas, Stefan Leutenegger, Paul H J Kelly, Andrew J Davison International Conference on Robotics and Automation, ICRA 2019 |
@inproceedings { Characterizing19,
author = { Sajad Saeedi, Eduardo D C Carvalho, Wenbin Li, Dimos Tzoumanikas,
Stefan Leutenegger, Paul H J Kelly, Andrew J Davison},
booktitle = { International Conference on Robotics and Automation (ICRA) },
title = { Characterizing Visual Localization and Mapping Datasets },
pages = { 6699--6705 },
year = { 2019 },
organization = { IEEE }
}
